

تبلیغات
تبلیغات متنی
محبوبترینها
قیمت انواع دستگاه تصفیه آب خانگی در ایران
نمایش جنگ دینامیت شو در تهران [از بیوگرافی میلاد صالح پور تا خرید بلیط]
9 روش جرم گیری ماشین لباسشویی سامسونگ برای از بین بردن بوی بد
ساندویچ پانل: بهترین گزینه برای ساخت و ساز سریع
خرید بیمه، استعلام و مقایسه انواع بیمه درمان ✅?
پروازهای مشهد به دبی چه زمانی ارزان میشوند؟
تجربه غذاهای فرانسوی در قلب پاریس بهترین رستورانها و کافهها
دلایل زنگ زدن فلزات و روش های جلوگیری از آن
خرید بلیط چارتر هواپیمایی ماهان _ ماهان گشت
سیگنال در ترید چیست؟ بررسی انواع سیگنال در ترید
بهترین هدیه تولد برای متولدین زمستان: هدیههای کاربردی برای روزهای سرد
صفحه اول
آرشیو مطالب
ورود/عضویت
هواشناسی
قیمت طلا سکه و ارز
قیمت خودرو
مطالب در سایت شما
تبادل لینک
ارتباط با ما
مطالب سایت سرگرمی سبک زندگی سینما و تلویزیون فرهنگ و هنر پزشکی و سلامت اجتماع و خانواده تصویری دین و اندیشه ورزش اقتصادی سیاسی حوادث علم و فناوری سایتهای دانلود گوناگون
مطالب سایت سرگرمی سبک زندگی سینما و تلویزیون فرهنگ و هنر پزشکی و سلامت اجتماع و خانواده تصویری دین و اندیشه ورزش اقتصادی سیاسی حوادث علم و فناوری سایتهای دانلود گوناگون
آمار وبسایت
تعداد کل بازدیدها :
1833159757












توليد پنجه مصنوعي مارمولك با قابليت كنترل چسبندگي
واضح آرشیو وب فارسی:جوان آنلاین: توليد پنجه مصنوعي مارمولك با قابليت كنترل چسبندگي
بلندكردن و گذاشتن اشيا، هسته اصلي در هر نوع از ساخت است. ولي انگشتها، چه انگشت انسان و چه انگشت روباتيكي، هميشه براي اين كار مناسب نيستند.
نویسنده : ترجمه: علي طالبي
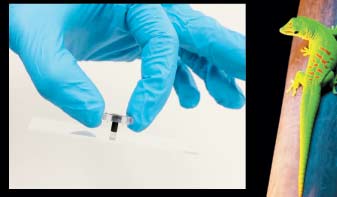
محققان در دانشگاه پنسيلوانيا، در حال ساخت نوع جديدي از گيرنده هستند كه از توانايي مارمولكهاي خانگي در چسبيدن و جداشدن از سطوح گرفتهشده است. اين گيرنده بسيار مناسب كار ظريف ساخت نيمه هاديها است. مانند مارمولك، اين گيرنده نيز از «چسبندگي تنظيمشونده» برخوردار است، يعني با اينكه هيچ قطعه متحركي ندارد اما چسبندگي مؤثر آن از قوي تا ضعيف قابل تنظيم است. برخلاف مارمولكها و تقليدكنندگان مصنوعي ديگر كه تنها بر ساختارهايي با اشكال پيچيده تكيه ميكنند، گيرنده ساختهشده توسط گروه پن (Penn) از ساختار دومادهاي سادهتري استفاده ميكند كه توليد انبوه آن آسانتر است. اين گيرندهها در ابعاد ميليمتري فعلي خود ميتوانند قطعههاي نرم و شكننده را حركت بدهند؛ مانند ورقههاي نازك سيليكون و شيشه. در اندازه كوچك، از آنها ميتوان به صورت دستهاي استفاده كرد تا به سطوح زبر و نرم بچسبند؛ كه باعث مفيد بودن آنها در بالا رفتن روباتها و كاربردهايي ديگر در مقياس بزرگ ميشود. اين تحقيق توسط كوين ترنر (Kevin Turner)، استاد تمام در دپارتمان مهندسي مكانيك و مكانيك كاربردي از مدرسه مهندسي و دانش كاربردي و هلن مينسكي (Helen Minsky)، فارغالتحصيلي كه در آزمايشگاه او فعاليت ميكند، انجام شده است. ترنر ميگويد: «هنگامي كه درباره چسبندگي تنظيمشونده صحبت ميشود، همه چيز مشابه مارمولكهاست و همه سعي دارند از آن تقليد كنند. مشكل اينجاست كه ساخت ساختارهاي پيچيده مانند طبيعت واقعاً سخت است. ما به استراتژياي دست يافتهايم كه همان رفتار چسبندگي را ميتوان به وجود آورد ولي به روشي بسيار آسانتر.» مارمولكها به خاطر ساختار پيچيده در كف پاهايشان، توانايي چسبيدن به سطوح با شيب تند را دارند. چيزي كه با چشم غيرمسلح، برآمدگيهايي به نظر ميآيد درواقع يك دسته انبوه از رشتههاي كوچك با نوكهاي پهن شده هستند كه مانند يك مجموعه دراز و نازك از قارچها از كف پاهايشان با زاويه بيرون زدهاند. اين رشتهها چسبناكند به خاطر پديدهاي به نام چسبندگي ون در والز (van der Walls adhesion)، كه هنگامي كه دو سطح در تماس قرار ميگيرند اتفاق ميافتد. هر چه فاصله تماس كمتر باشد، نيروي جاذبه بين دو سطح نيز بيشتر است. نيروهاي ون در والز در زندگي روزمره قابل تشخيص نيستند زيرا حتي دو سطح بسيار صاف نيز در اندازههاي ميكروسكوپي، به اندازه كافي زبر هستند كه باعث بيتأثير شدن اثر ميشود ولي با تعداد زيادي رشته با سرهاي پهن كه با سطح زبرديوار همتراز هستند، نيروهاي ون در والز براي چسبيدن مارمولك به ديوار، به اندازه كافي قوي خواهد بود. قابليت تغيير زاويه پاها، باعث ميشود كه چسبندگي مارمولك قابل تنظيم شود؛ كه همين هم به آنها امكان جدا شدن از ديوار براي قدم برداشتن را ميدهد. محققان ديگر براي به دست آوردن چسبندگي تنظيمشونده، ساختارهاي كف پاي مارمولك را تقليد كردند. ولي ساختن آن سخت است. امكان ساخت چند تا از آنها وجود دارد، ولي اگر به دنبال ساخت دستههاي بزرگتر از آنها باشيم، اين كار بسيار سختتر ميشود. زوايا و سرهاي پهن به اين معني است كه نميتوان آنها را به راحتي از روي الگو ساخت. رويكرد تيم پن براي درك قابليت تنظيم شدن و همچنين رفع مشكل ساخت، در گيرندهاي با ساختار كاملاً متفاوت قرار دارد. بهجاي اينكه آن رشتهها زاويهدار يا داراي سر پهن باشند، آنها تنها تيرهايي استوانهاي هستند. راز كار در ساخت تركيبي آنهاست: هسته پلاستيكي سخت كه با پوسته لاستيك مانندي از سيليكون احاطه شده است. هروقت گوشهاي داشته باشيم، پس قسمتي با تنش بيشتر وجود دارد. دليل اينكه رشتههاي كف پاي مارمولك بهخوبي به ديوار ميچسبد به دليل وجود نوكهاي قاچ مانندي است كه ناحيهاي با تنش بالا از لبه تا مركز بهوجود ميآورد، جايي كه بهوجود آوردن ترك سخت است. منبع: ساينس ديلي
منبع : روزنامه جوان
تاریخ انتشار: ۰۳ تير ۱۳۹۴ - ۱۳:۱۱
این صفحه را در گوگل محبوب کنید
[ارسال شده از: جوان آنلاین]
[مشاهده در: www.javanonline.ir]
[تعداد بازديد از اين مطلب: 177]

-
اجتماع و خانواده
پربازدیدترینها