

تبلیغات
تبلیغات متنی
محبوبترینها
بارشهای سیلآسا در راه است! آیا خانه شما آماده است؟
بارشهای سیلآسا در راه است! آیا خانه شما آماده است؟
قیمت انواع دستگاه تصفیه آب خانگی در ایران
نمایش جنگ دینامیت شو در تهران [از بیوگرافی میلاد صالح پور تا خرید بلیط]
9 روش جرم گیری ماشین لباسشویی سامسونگ برای از بین بردن بوی بد
ساندویچ پانل: بهترین گزینه برای ساخت و ساز سریع
خرید بیمه، استعلام و مقایسه انواع بیمه درمان ✅?
پروازهای مشهد به دبی چه زمانی ارزان میشوند؟
تجربه غذاهای فرانسوی در قلب پاریس بهترین رستورانها و کافهها
دلایل زنگ زدن فلزات و روش های جلوگیری از آن
خرید بلیط چارتر هواپیمایی ماهان _ ماهان گشت
صفحه اول
آرشیو مطالب
ورود/عضویت
هواشناسی
قیمت طلا سکه و ارز
قیمت خودرو
مطالب در سایت شما
تبادل لینک
ارتباط با ما
مطالب سایت سرگرمی سبک زندگی سینما و تلویزیون فرهنگ و هنر پزشکی و سلامت اجتماع و خانواده تصویری دین و اندیشه ورزش اقتصادی سیاسی حوادث علم و فناوری سایتهای دانلود گوناگون
مطالب سایت سرگرمی سبک زندگی سینما و تلویزیون فرهنگ و هنر پزشکی و سلامت اجتماع و خانواده تصویری دین و اندیشه ورزش اقتصادی سیاسی حوادث علم و فناوری سایتهای دانلود گوناگون
آمار وبسایت
تعداد کل بازدیدها :
1835898331













مدار کنترلر PWM
واضح آرشیو وب فارسی:تبیان: مدار کنترلر PWMPWM مخفف کلمه لاتین pulse width modulation است، در این روش هدف کنترل سرعت موتور با استفاده از دریافت پالس یا سیگنال است
سرعت موتور در هنگام حرکت را می توان کم یا زیاد کرد . موتورها در اشکال و اندازه و مشخصات مختلفی در بازار یافت می شوند که به تبع آن درایور مربوط به سرعت آن ها نیز متفاوت می باشد سرعت دور یا چرخش یک موتور DC وابسته به تغذیه آن می باشد به طور مثال اگر یک موتوری که بتواند ولتاژ 12 ولت را تحمل کند به تغذیه 12 ولت متصل کنید و سپس ولتاژ تغذیه آن را تا مقدار 6 ولت پایین بیاورید سرعت چرخش آن نصف حالتی خواهد بود که شما به آن ولتاژ 12 ولت را می دادید در حالت PWM کنترل موتور به صورت دستی انجام نمی شود بلکه این میانگین ولتاژ های فرستاده شده توسط مدار درایور موتور است که سرعت موتور را کم و زیاد می کند.هنگامیکه یک فیلم را مشاهد می کنیددر واقع شاهد هزاران عکس ثابت هستید که با یک فرکانس بالا آن را مشاهده می کنید سرعت پخش شدن عکس ها آنقدر زیاد است که مغز شما فواصل زمانی بین پخش شدن و عدم پخش شدن را نمی تواند تشخیص دهد. در واقع مغز شما میانگین این عکس ها را مشاهده می کند در کنترل PWM نیز همین وضعیت وجود دارد آنقد سرعت روشن و خاموش شدن زیاد است که شما متوجه آن نمی شوید هر چه فرکانس کاری بالاتر باشد موتور سریعتر روشن و خاموش می شود و در واقع میانگین، چیزی که شما مشاهده می کنید سرعت بیشتر موتور و زمانی که فرکانس پایین باشد فواصل زمانی روشن و خاموش شدن موتور کمتر می شود که شما میانگین آنرا با سرعت کمتر موتور مشاهده خواهید کرد در واقع مانند یک فیلم شما نیز میانگین روشن و خاموش شدن را می بینید در این حالت مغز شما سرعت این روشن و خاموش را به صورت سرعت کم و زیاد مشاهد خواهید کرد در زیر دو نمونه عملی و ساده یک مدار کنترل دور موتور با استفاده از پهنای پالس را مشاهده می کنید.
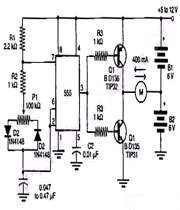
با استفاده از مدار نشان داده شده می توان موتورهای dc با جریانهای تا چندین آمپر را کنترل نمود هنگامی که خروجی 555 در سطح منطقی High باشد، ترانزیستور NPN جریان تأمین شده از منبع B2 را هدایت می کند و زمانی که خروجی IC در سطح منطقی Low باشد، ترانزیستور PNP جریان تأمین شده از منبع B1 را هدایت می کند.با افزایش مقدار مقاومت های موجود در بیس ترانزیستورها از 1K به 4.7K یا 10K می توان از ترانزیستورهای دارلینگتون نیز استفاده نمود. برای انتخاب مقادیر مناسب C1 باید دقت کافی مبذول داشت. مقدار این خازن را می توان به صورت تجربی و از روی آزمایش به گونه ای انتخاب نمود که با مشخصه های موتور سازگار بوده و بدین ترتیب از ارتعاش موتور هنگامی که موتور در شرایط راه اندازی صفر باشد، جلوگیری نمود. برای جلوگیری از این ارتعاش می توان خازنی با مقدار بین .01 uF تا 1uF را به صورت موازی با موتور متصل نمود.به خاطر داشته باشید که عیب بزرگ این نوع مدار کنترل در این نکته است که در حالت راه اندازی توان صفر، جریان تحویلی توسط منابع تغذیه صفر نیست و امکان ایجاد مقادیر زیادی گرما در موتور وجود دارد. این نوع مدار برای کنترل بارهای مقاومتی نظیر هیترها، SMA ها و دیگر بارهای از این قبیل مناسب نیست برگرفته از سایت دانشنامه و دانشجو . ای ارتنظیم برای تبیان: سیدخاموشی
این صفحه را در گوگل محبوب کنید
[ارسال شده از: تبیان]
[مشاهده در: www.tebyan.net]
[تعداد بازديد از اين مطلب: 6939]

-
گوناگون
پربازدیدترینها